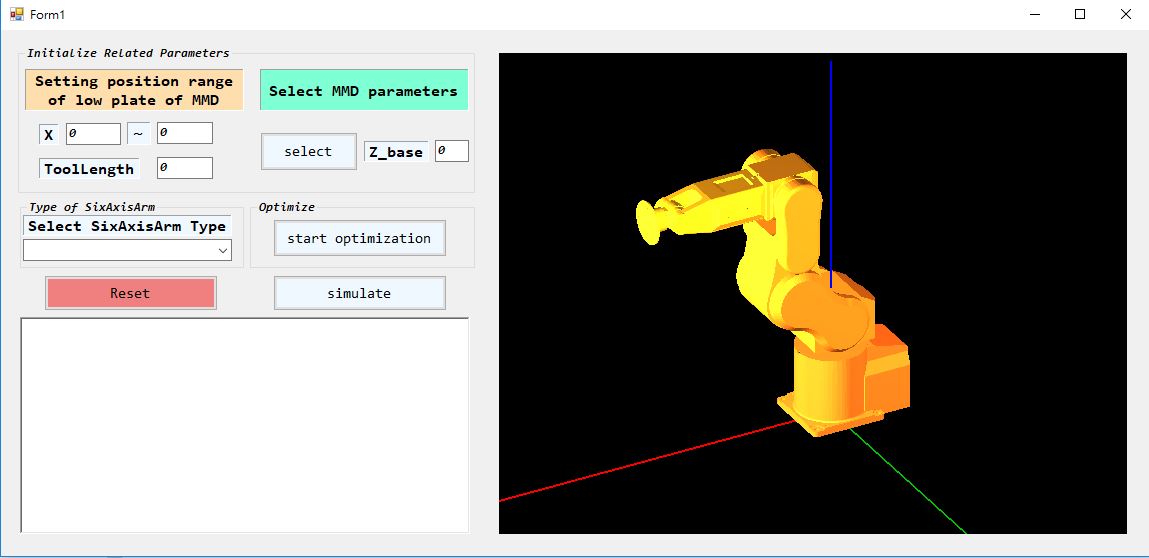
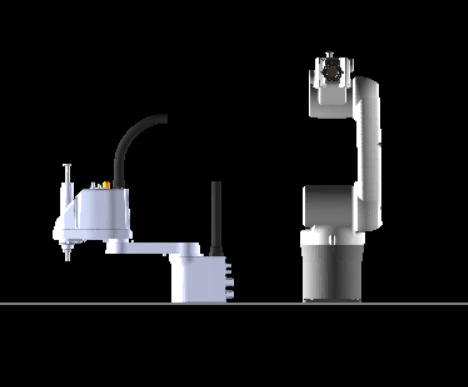
Robot Simulator
- Independently developed a motion simulator of robotic manipulators that can help detect collisions and visualize motions.
- Combined left-children right-sibling tree data structure and DH convention, and utilized preorder traversal algorithm to draw and display assemblies.
- Invented Single-Axis Dragging algorithm to operate joint space motion of a six-axis arm through simple click-and-drag.
- Invented the patent-pending 6 DoFs interactive marker and the build-in algorithm, allowing user to manipulate the end-effector position and orientation of a six-axis arm effectively and intuitively.
- Accomplished Damped-Least Squares method to solve the Inverse Kinematics problem numerically.
Keywords: Industrial Robot, Animation, Kinematics, Damped Least Squares, Collision Detection, OpenGL, Bullet Physics.
VIDEO